※危険な工程があります。真似する際は様々な資料を参考に自己責任でお願いします。

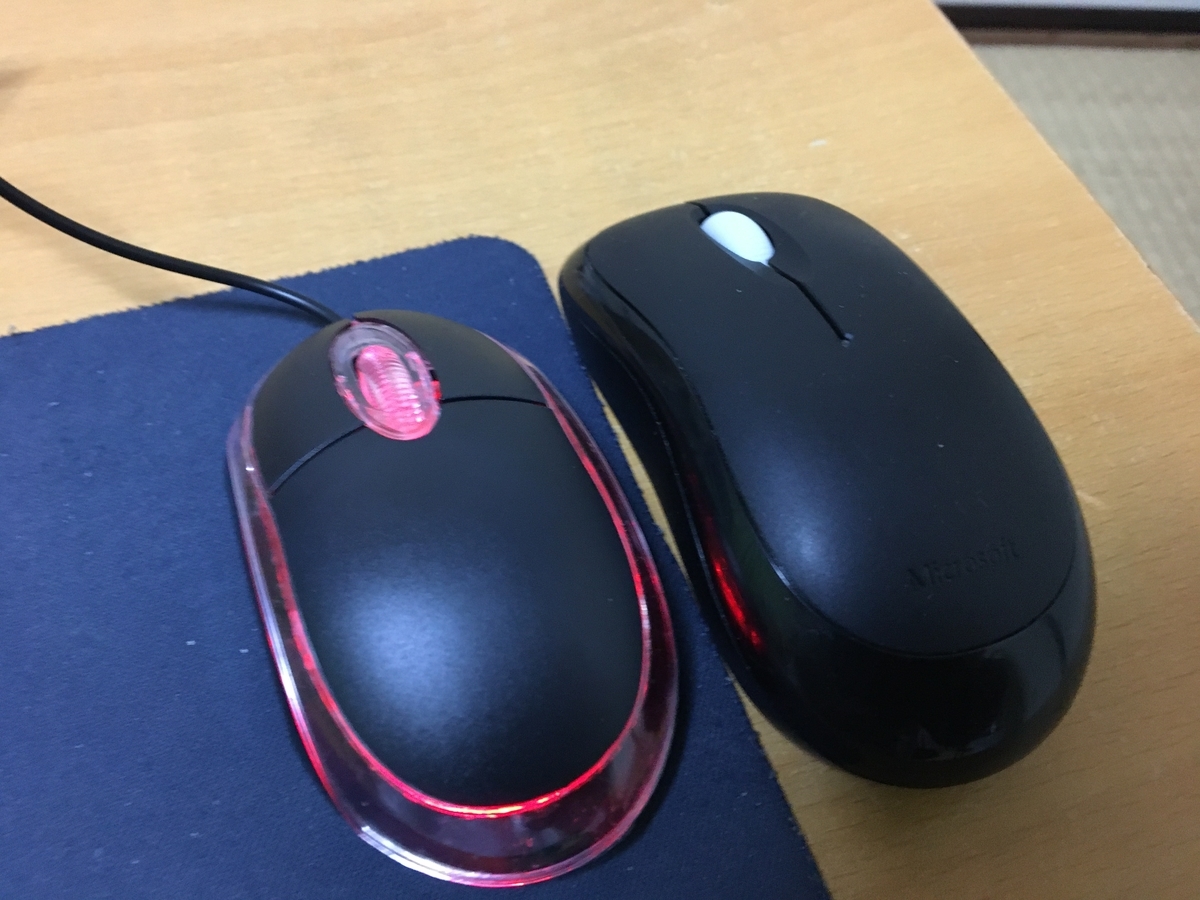
ダイソーで500円で変えるモバイルバッテリーを購入しました。意外とコンパクト。普通に使えそう。
これは,M5 Atom用のバッテリーモジュールを自作するために購入しました。Switch-scienceとかでLi-Poバッテリーを充電するものがあります.900~1500円くらいで購入できます。
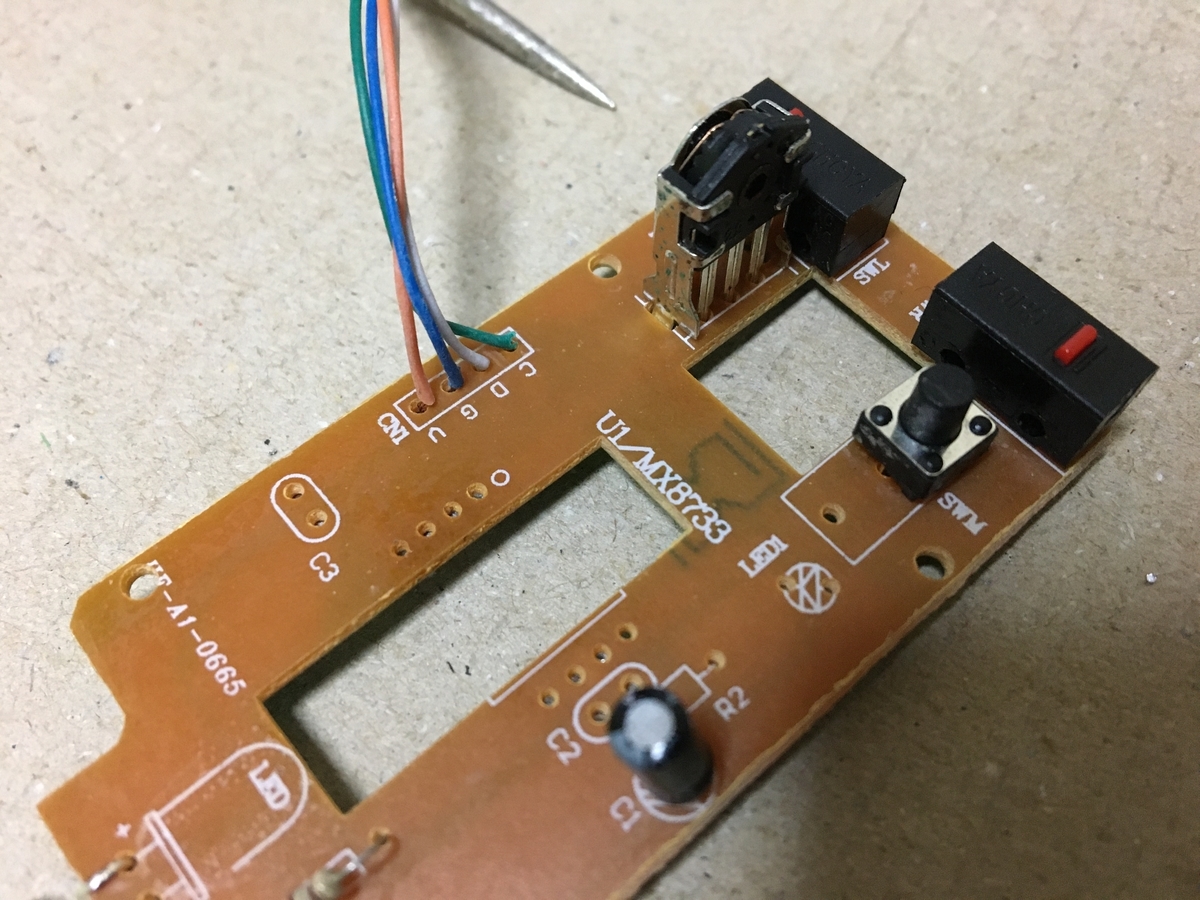
分解してみました。

両極のはんだを取り除いて基板とバッテリーを分離させます。
それをピンヘッダにに接続してホットボンドで固定します。専用コネクタとかがあればそのほうがいいと思います。今回は頂いたバッテリーを使います。コネクタの形状がQIだったため、ピンヘッダにしています。逆刺し防止を考えるなら、RCYやXT30とかで作るといいと思います。

小さなバッテリーに換装しました。
これはミニロボットに取り付ける用のバッテリーコントローラにします。しっかりと絶縁をして、取り付けしていきます。

プログラムを書き込んだら完成!PS3で直接操作するロボットです。
動いた!
— Ar-Ray (@Ray255Ar) 2021年1月8日
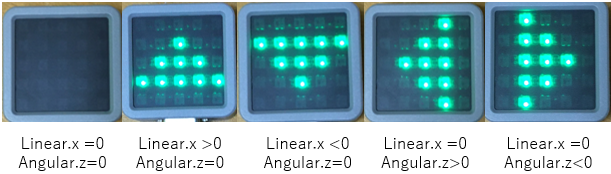
コントローラーはPS3を使っています🎮 pic.twitter.com/Bz3orRm5bL
注意したいのが、モータの電源はバッテリーから直接引く必要があります。電流が多量に流れて保護機能が働いてしまうためです。あと、一度電源をONにすると、モバイルバッテリー側から電源をOFFにする手段がないので、電源をUSBから抜くか、コネクタを抜くかのどちらかが必要です。結構面倒なうえに危険なので、こんなものを作るくらいなら買ったほうがいいと思います。