ROSの画像などを表示して確認するツールとしてRvizやRqt_graphなどがありますが、複数表示したり自由に配置したいと思いました。

そのときに使えるツールがrqt_guiです。rqt_image_viewやrqt_graph、rqt_plotやその他自作プラグインを動的に配置することができます。めっちゃ便利。
しかし、Rvizと同様にその設定ファイルを手元においてロードしなければ使えない…となり、いろいろと使い方を探していました。
ROS2に対してのリファレンスが乏しくこの課題の解決に対して20分くらいかかったので軽く使い方などを解説します。
Rqt_guiの使い方
1.Rqt_guiを開く
$ ros2 run rqt_gui rqt_guiコマンドでrqt_guiを開きます。Rviz2起動時と同様にROS2の環境をロードしてください。
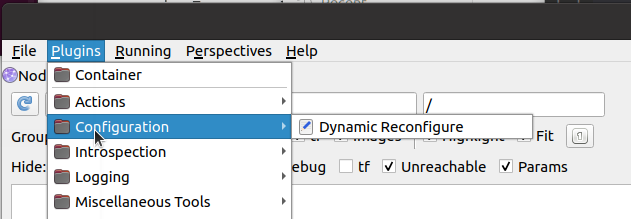
2.Rqt_guiにいろいろとプラグインを入れる
「Plugins」タブから使いたいツールを選択します。
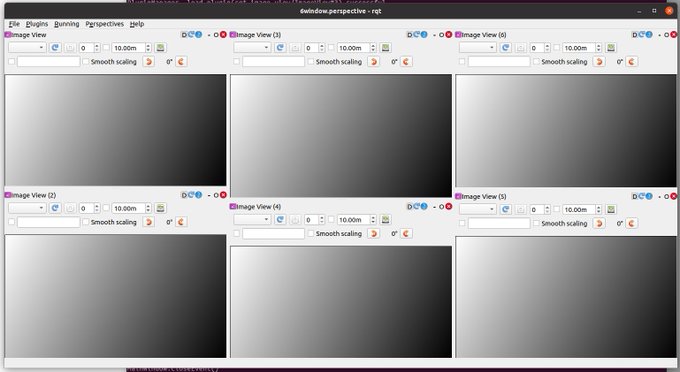
↓ こんな感じにrqt_image_viewを配置してみました。
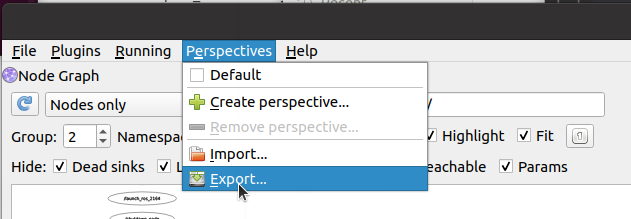
3.Rqt_guiからファイルをエクスポートする。
「Perspectives→Export」タブから作成したウィンドウをエクスポートできます。.perspectiveという拡張子のxmlファイルが生成されます。
トピック名や配置など様々な情報を持っているので、必要に応じて書き換えれば動的にRqt_guiを生成できそうです。
4.Rqt_guiで読み込む
--perspective-fileオプションの引数にエクスポートされたファイルのパスを指定することでRqt_guiの画面を再現することができます。rqt_guiを開いたあとに「Perspectives→Import」でファイル指定しても読み込めると思います。
# 設定ファイル:example.perspective ros2 run rqt_gui rqt_gui --perspective-file ./example.perspective
今までウィンドウがバラバラだったのが解決したのでかなり快適になったと思います。GitHubなどでデモを公開するときに使えて便利だと思うので積極的に使っていきたいです。
GUI設計しなくていいというのは強い。
ROS2に関する書籍です。ROS2の情報はROS1ほどは多くないので、初めて使うなら本を1冊購入して勉強したほうがよいと思います。
 | ROS2ではじめよう 次世代ロボットプログラミング [ 近藤 豊 ] 価格:3,058円 |
![]()
 | ロボットプログラミングROS2の実装・実践 実用ロボットの開発/内木場文男【3000円以上送料無料】 価格:3,520円 |
![]()