ATOMS3が昨年末に発売されました。
私は、スイッチサイエンスでの販売開始直後に購入しました。

ATOM S3は、M5Stack atomシリーズの派生で、MCUにESP32-S3を使用しています。
また、ATOM-Matrixと異なりATOM-S3には120x120ディスプレイやUSBデバイス機能なども搭載されています。
M5Stackにも似た機能はありますが、バッテリーがなく小型なのは(管理的に)助かります。
Announcing ESP32-S3 for AIoT Applications | Espressif Systems
USBを差すと、Wi-FiスキャンやBluetooth、IMUなどのテストを試せます。素晴らしい。

ゲームパッドを作ろう🎮
3ヶ月後にこの記事が上がるということは、はい、そういうことです。
私はこれまでこのATOMS3を早期で購入しておきながら積みマイコンしていました…
とりあえず何か1つでも作っておきたいと思ったので、IMUで動かせる有線のゲームパッドを作ることにしました。
ロール軸が左ジョイスティックのx軸、ピッチ軸がy軸に対応して、ボタンは将来的にモード切り替えなどに使えればいいかなと
これまでUSBデバイスは作ったことはなかったので、とりあえず体験として動かしてみることにしました。
環境
いつもはVSCode上のPlatformIOをよく使っていますが、今回はM5Stackのチュートリアルに従ってインストールを進めました。
Arduinoにはシリアルプロッタがあるので助かります。
IMU
ATOMS3には6軸IMUのMPU6886が搭載されているので、これを用いて roll,pitchを取得します。
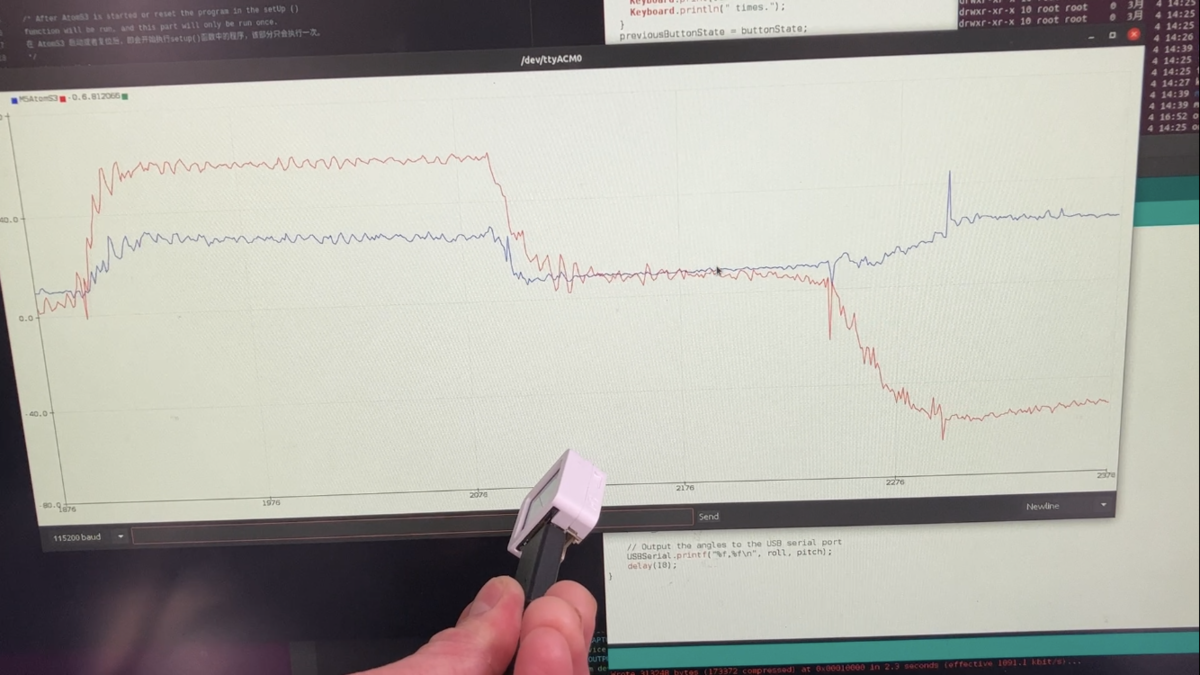
以下はRollPitchを求めるプログラムです。(最終的にシリアル通信は消してしまうので、通信部分はなんとなくで書いています🙏)
#include "M5AtomS3.h" #include <math.h> float ax, ay, az, gx, gy, gz, t; void calculateRollPitch(float& roll, float& pitch) { M5.IMU.getAccel(&ax, &ay, &az); M5.IMU.getGyro(&gx, &gy, &gz); roll = atan2(ay, az) * 180.0 / M_PI; pitch = atan2(-ax, sqrt(ay * ay + az * az)) * 180.0 / M_PI; float dt = 0.01; static float roll_prev = 0, pitch_prev = 0; roll += (gx / 131.0) * dt; pitch += (gy / 131.0) * dt; roll = roll * 0.98 + roll_prev * 0.02; pitch = pitch * 0.98 + pitch_prev * 0.02; roll_prev = roll; pitch_prev = pitch; } void setup() { M5.begin(true, true, true, false); USBSerial.begin(115200); M5.IMU.begin(); M5.Lcd.printf("TEST"); } void loop() { float roll, pitch; calculateRollPitch(roll, pitch); USBSerial.println("%f, %f", roll, pitch); M5.Lcd.fillScreen(BLACK); draw_ball(64 + roll, 64 - pitch, 10, RED); delay(10); }
ちゃんと角度算出できていました。
ゲームパッド
次のプログラムを参考にプログラムを作成しました。このライブラリは、AtomS3の依存関係に含まれていたので、追加でパッケージを追加することなく使えました。
arduino-esp32/Gamepad.ino at master · espressif/arduino-esp32 · GitHub
最終的に次のようなプログラムになりました。
ボタン機能も追加したかったのですが、今回は動かず…
他の使い方を模索したいと思います。
(あと、ATOMS3のボタンはディスプレイを直接押下するので、壊しそうで怖いですね)
書き込むと、ジョイパッドとして認識されます。
Ubuntu/Ubuntuでジョイスティックを使用する方法 - Linuxと過ごす を読んで動作確認しました。
sudo apt install -y joystick jstest-gtk jstest-gtk
jstest-gtkで認識していました。

🎮🎮🎮 pic.twitter.com/DoNku2n69Y
— Ar-Ray 🍓 (@Ray255Ar) 2023年3月4日
Turtlesimで動かしてみる。
ジョイスティックとして振る舞っているので、これまでのROSパッケージのジョイスティックを置き換えることもできます。
遅いけど、動いたのでヨシ!🐢 pic.twitter.com/XbmsmrF0rZ
— Ar-Ray 🍓 (@Ray255Ar) 2023年3月4日
PlayStationのデータをTwistに変換するプログラム(HarvestX/PlayStation-JoyInterface-ROS2)を使用しました。
teleop.launch.py
において
hw_type:=DualShock4とtopic_name:=/turtle1/cmd_velの引数が必要です。
1000円でゲームパッドを買うこともできますが、マイコンを使ってコントローラを作るだけでもいい体験になりそうな気がしますね。
楽しい。