既視感があると思いますが、librealsenseはRaspberryPi Bookwormで動きます(RealSense・Raspbian) - えいあーるれいの技術日記 の続きです。
実は、これ関連であともうひとネタあるのですが、こちらは来週に投稿できればなと思います。
つまり、今月は3週連続RealSense… 📷😇📷
RealSenseニキに喧嘩売っちゃったし、仕方ないね。
RealSense Viewerとは?
RealSense viewerはIntel RealSenseがリリースしているGUIアプリケーションです。
静止画・動画 (rosbag)の撮影、3Dプロット・ヒートマップで問題の解決策を探ったり、結構このアプリケーションでできることは多く、あのGUIアプリに助けられている人は多いと思います。
ちなみにオープンソースです。
RaspberryPi Bookwormで動かしてみよう!
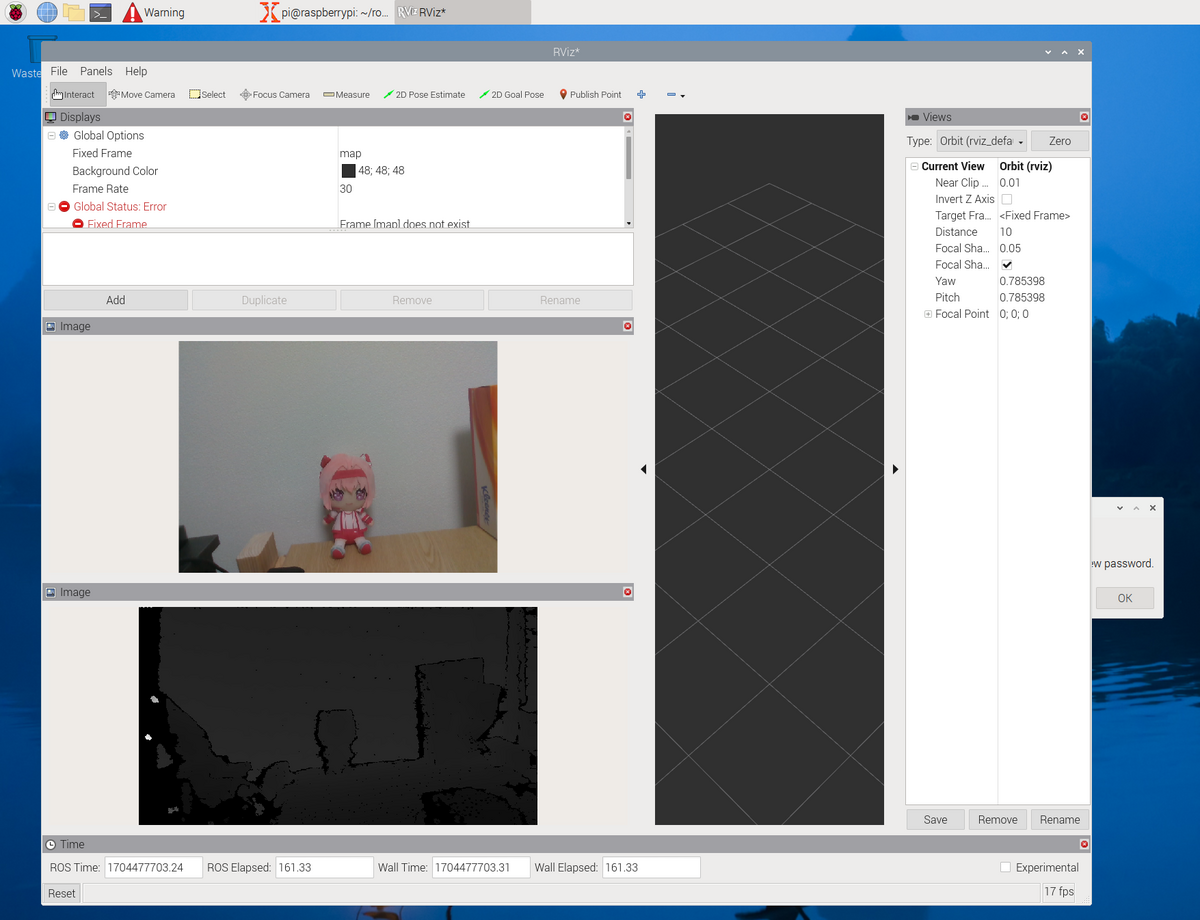
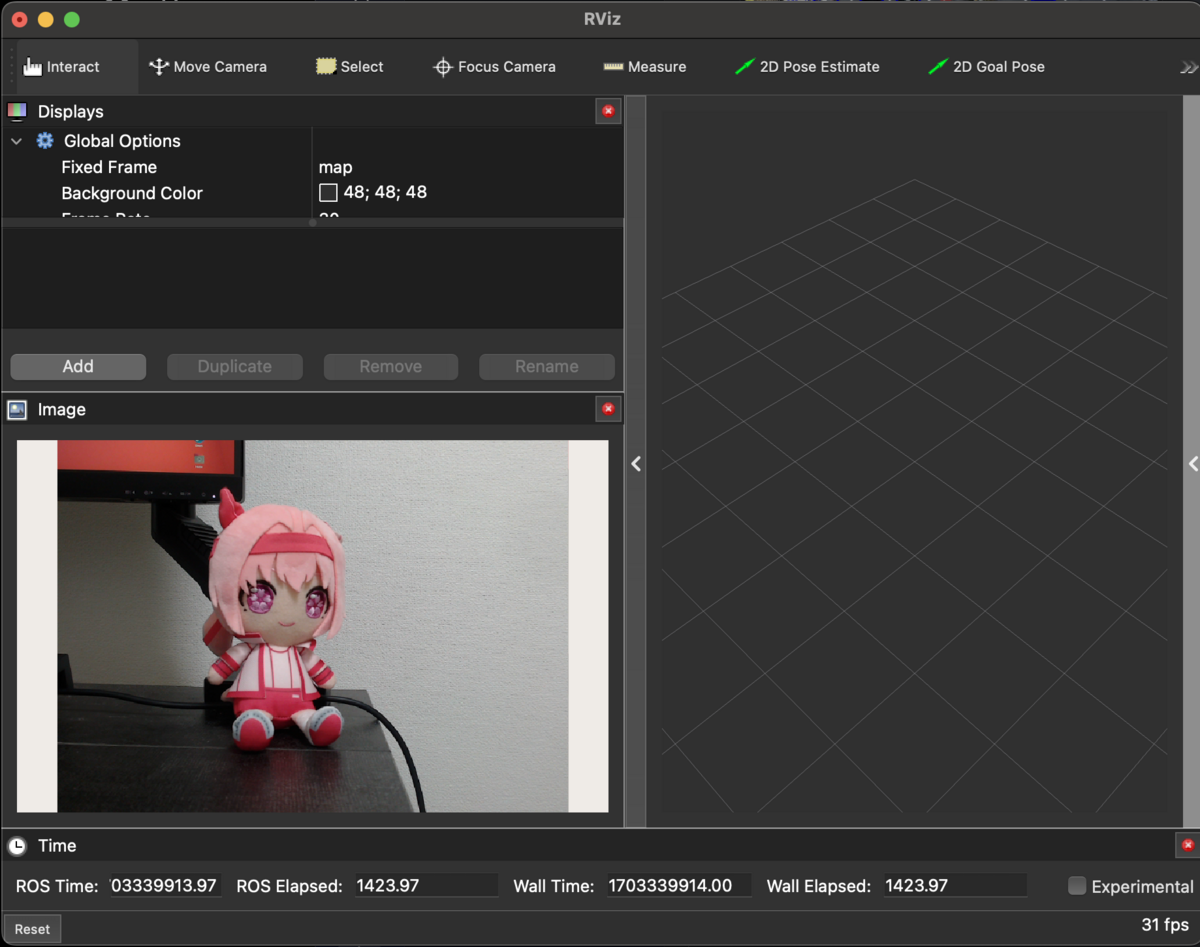
先週、「librealsenseはRaspberryPi Bookwormで動きます」と言いましたが、初心者向けを謳うのであればやはりGUIのサンプルが動いてくれないと困りますよね。論より証拠という言葉もありますし。
…というわけで動かしてみました❗️

GL系のライブラリ大丈夫かなぁと思っていましたが、結果は問題なしでした。
私の環境はX11でテストしています。もし動かなかった場合はWaylandから切り替えてみてください。
インストール方法
以下のリポジトリにも同様のインストール方法が載っています。
installer/02_librealsense/README_Raspbian.md at main · Ar-Ray-code/installer · GitHub
なお、バージョン互換性の関係上、T265のサポートはしていません。
動作確認環境
『サポートしてます!』というにはちょっと動作テストが足りなすぎるので、参考程度に。
- Raspberry Pi OS 64bit bookworm
- Ubuntu22.04 arm64
大体のbookwormで動くバイナリ、ubuntu22でも動くので、個人的にはRock5でも動くといいなぁと思ってます。
インストール
クリーンインストールしたRaspberryPi OS Bookwormに独自ビルドのlibrealsenseをインストールします。
cd ~/ wget https://s3.ap-northeast-1.wasabisys.com/download-raw/dpkg/librealsense/debian/bookworm/librealsense-rsusb-app-bookworm-2-54-2-arm64.deb -O ./librealsense.deb # 2.54.2 / bookworm sudo apt install ./librealsense.deb sudo ldconfig # librealsense-glのリンクエラーの解消 # udev-rulesの適用 sudo curl https://raw.githubusercontent.com/IntelRealSense/librealsense/master/config/99-realsense-libusb.rules --output /etc/udev/rules.d/99-realsense-libusb.rules sudo udevadm control --reload-rules sudo udevadm trigger
これでOK。
実行
realsense-viewer
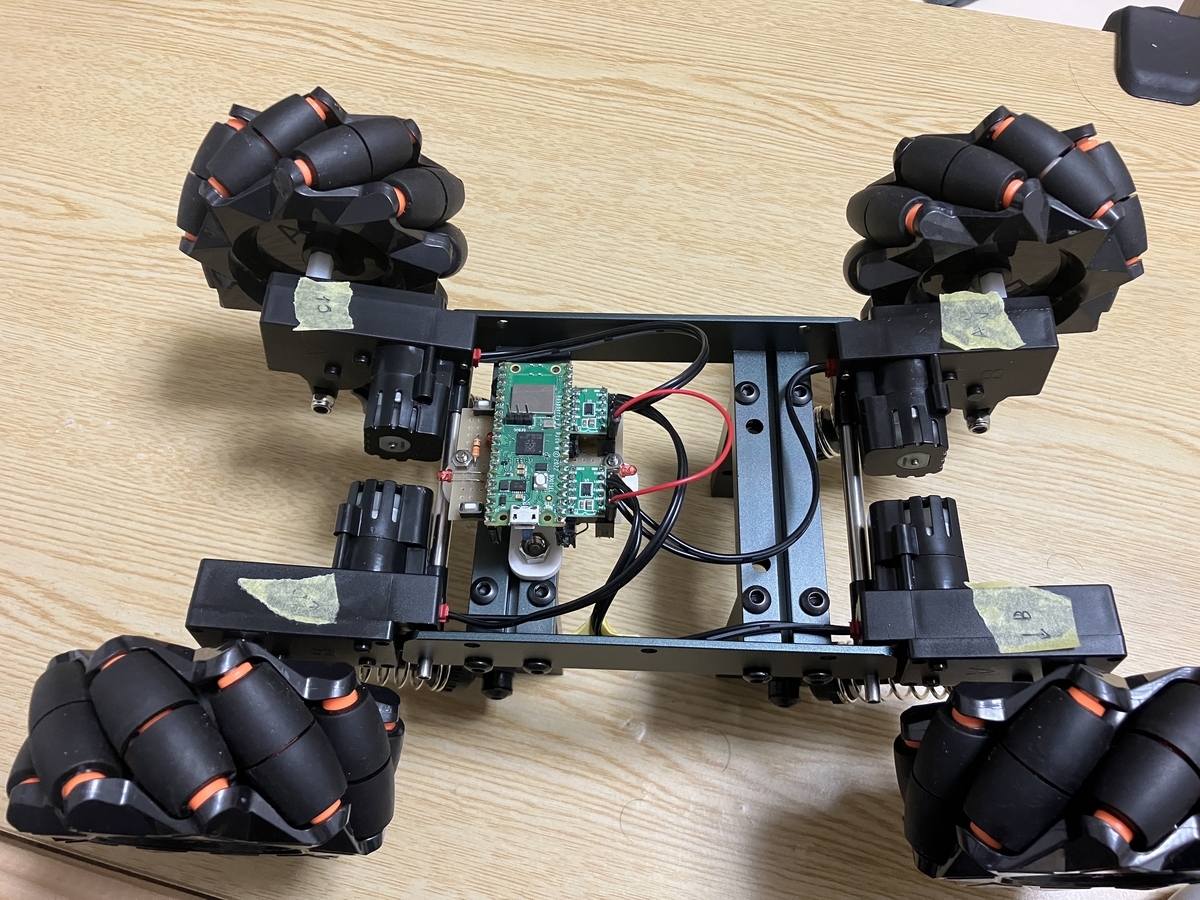
補足1:ビルド環境
ターゲットボード:RaspberryPi 4 OS:RaspberryPi OS Bookworm (debian12)
ビルド対象:librealsense v2.54.2
ビルドレシピは非公開ですが、大体はIntelのページを見れば分かります。
Linux/Ubuntu - RealSense SDK 2.0 Build Guide
補足2:CPU使用率
おそらく2Dレンダリングのお話
- RGBD:約200%
- depthのみ:約70%
- colorのみ:約110%
こちらを使用させて頂き、RasPi4(Bookworm)上でrealsense-viewerのCPU使用率を確認。
— dandelion (@dandelion1124) 2024年1月8日
- RGBD:約200%
- depthのみ:約70%
- colorのみ:約110%
ということでColor周りの処理が重そうなことがわかってきた。 https://t.co/tAOhoGr6yF
解像度を落とすと結構収まりが良くなりそう。
さすがにIntel側がARM最適化をしているとは思えないので、困ったらCeleronとか使うといいと思います。
スティックPCとかであれば2万くらいで買えるのでおすすめ。省電力に振ればARMボードと電力・コスパ勝負できなくはない…?レベルになります。