motpyのサンプルをROS2に実装してみた(motpy_ros) - えいあーるれいの技術日記
単眼YOLOトラッキングを可能にするdarknet_trackingの解説 - えいあーるれいの技術日記
の続きです。2021年3月21日時点での最初のコミットから2ヶ月経過してリポジトリの中身も変わってきたので、補足しようと思います。
リポジトリはこちら↓
ROS Japan UG #42 LT大会ではこの内容について発表します。Qiitaの5月分の記事にもします。
変更点
ROS1のサポート
パラメータの追加
srv対応(ROS1のみ)
タグの描画
1.ROS1のサポート
大体の大学生・高専生は研究室配属が決まるまで一度もROSを触ることがないので大抵初心者です。そのため、サンプルを示して挙動確認やハンズオン形式での講習が必要です。本当はROS1で実装する予定はなかったのですが(仕方なく)実装することにしました。
ROS-Noeticで動作確認をしています。
2.パラメータの修正・追加
画像サイズについてパラメータ名を統一しました。
frame_size/width:画像横幅
frame_size/height:画像高さ
imshow_isshow:cv2.imshowの表示・非表示(1で表示。デフォルトは1)
3.srv対応(ROS1のみ)
- ROS1のみですが、serviceに対応しました。
$ roslaunch motpy_ros example_srv.launchで実行します。自分で作っておいて言うことではないですが、正直いらないです。
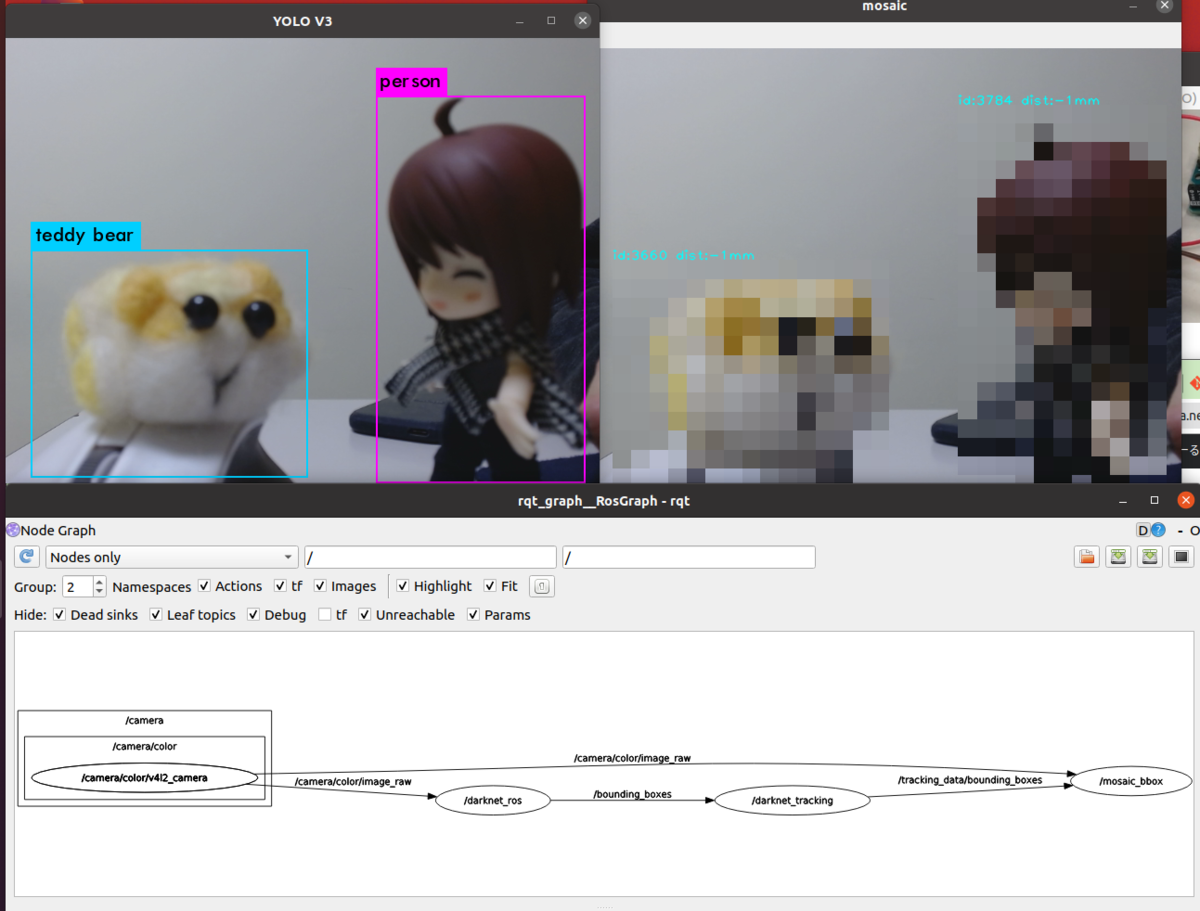
4.タグの描画
追跡中の番号を水色文字で表示できるようにしました。Realsenseの入力があれば、距離も表示できます。現時点ではmotpyがクラス名を識別できないので、personのみに絞り込みを行って実行するか、motpyを改良する必要があります。