ROSの環境をpyenvのような表示で区別する - えいあーるれいの技術日記の続きです。
GitHubにプッシュしたものはいいものの、全然使い方を解説していなかったので簡単に解説します。とても使いやすくて便利なので、私はROSのセットアップ後に必ず入れています。ぜひ使ってみてください。
以下のリンクがリポジトリです。
セットアップ方法
Ubuntu20.04(Foxy)とUbuntu18.04(Dashing)とUbuntu16.04(Bouncy)に対応しています。eloquentユーザはそのままのros2_init.bashでは環境がロードされないので、注意してください。
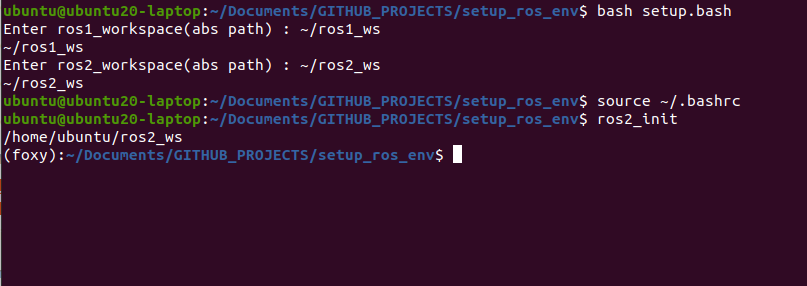
$ cd ~ $ git clone https://github.com/Ar-Ray-code/setup_ros_env.git $ cd setup_ros_env $ bash setup.bash >> Enter ros1_workspace(abs path) : ~/ros1_ws >> ~/ros1_ws >> Enter ros2_workspace(abs path) : ~/ros2_ws >> ~/ros2_ws
使用法
使いたいバージョンを選択すればいいです。
ROS1の場合
example@example:~$ ros1_init (noetic):~$
ROS2の場合
example@example:~$ ros2_init (foxy):~$
ROS1(ROS2)を使う予定がない場合
Enter ros1_workspace(abs path) で入力するときに何も入力せずにEnterを押せばスキップされます。ROS2の場合はEnter ros2_workspace(abs path)の時点でEnterを押してスキップしてください。
~/.bashrcの時点で環境をロードする場合
バージョンの切り替えをせずに~/.bashrcの時点でfoxyをロードするけど、(foxy)を使いたい場合は、インストールは行わずに.bashrcに次のように記述します。
source /opt/ros/foxy/setup.bash if ! test -z "$ROS_DISTRO"; then export PS1="($ROS_DISTRO):\[\033[01;34m\]\w\[\033[00m\]$ " fi