このページではRaspberry Pi OS (Lite) をrclsharkで動かして、そのイメージのバックアップのURLを公開しています。
rclsharkを活用する上で何かしらサンプルを提供したいと思っていたのですが、結果「RaspberryPi OSにrclsharkをインストール」ということにしました。
これなら初心者でもrclsharkの恩恵を受られる✨
というわけで、rclsharkのリリースページとGoogle DriveからRaspberryPi OSのイメージをダウンロードできます!
Google Driveの方は2021年中まではダウンロード可能です。それ以降は予告なく消すかもです。
イメージ書き込みステップ
画像を用意するの面倒だったので、技育展で使用したスライドそのまんま使います。
イメージのダウンロードをする
(GitHubのリリース限定)ファイルの結合:
$ cat split-raspbian-00 split-raspbian-01 >> rpi.7z7zファイルの解凍:
$ 7z x rpi.7zLinuxの場合はp7zip-fullをインストールしてください。SDカード(CM4-emmcの場合はemmc)への書き込み:rpi-imagerなどで書き込みます。
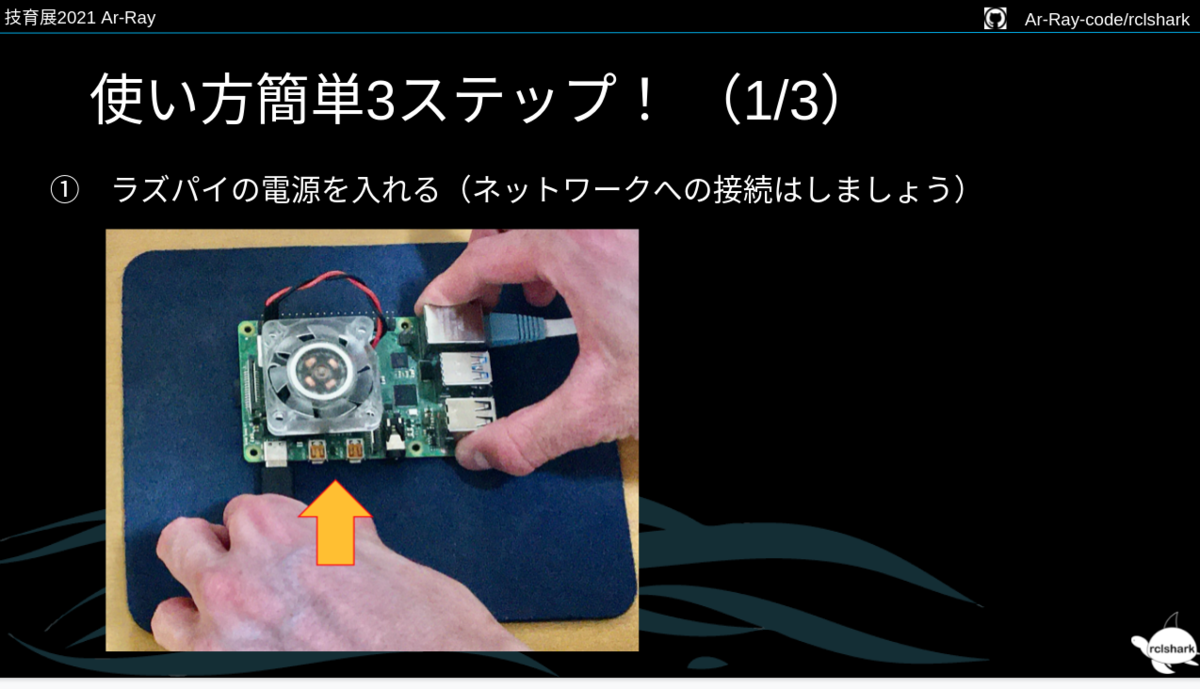
Ethernetケーブルと5V3A電源を接続します。(ホストコンピュータとラズパイは同じLANで接続してください)
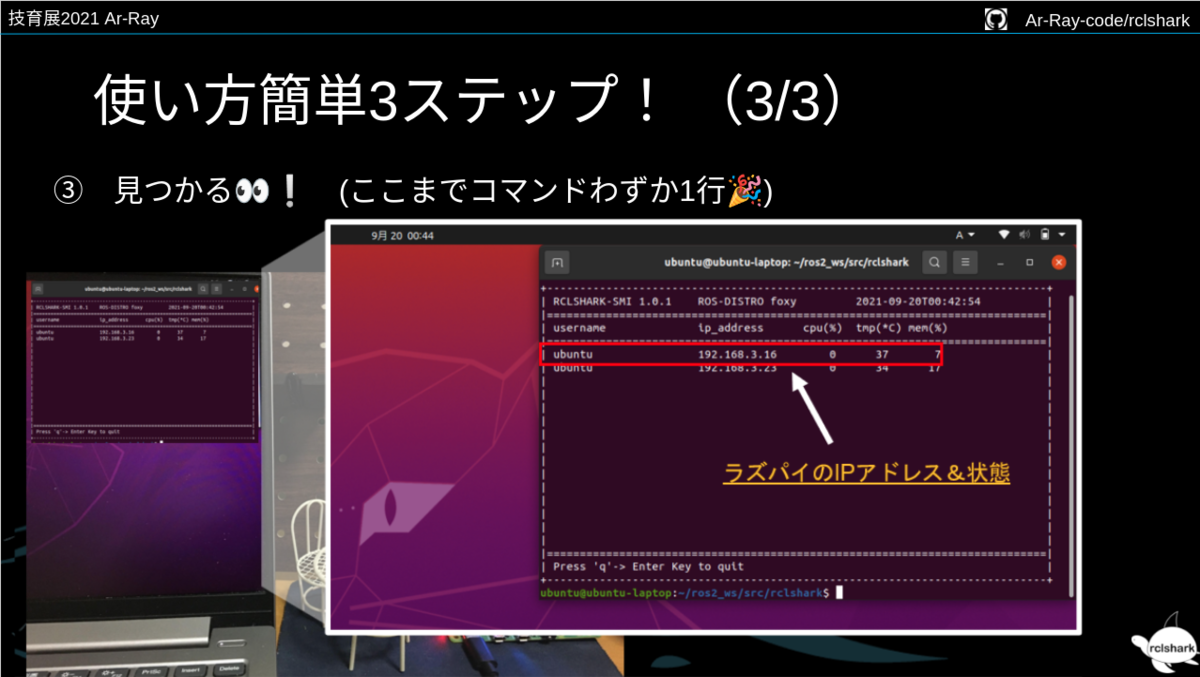
初回起動だと3分くらいかかりますが、同じLAN内のROS2インストール済みコンピュータから検索することができます。もちろんrclshark-smiでも見つかります!
$ ros2 node list | grep end /ip_172_23_2_115_end
このシステムはrclsharkを推しているのでlite(GUIなし)をベースにしています。快適なリモートマシンライフを!
Raspi OS + ROS2のインストールについて
ROS2は通常aptでDebパッケージを介してインストールしますが、Raspi OSにはROS2をインストールする手段がありません。なのでビルドしちゃいました。
RaspbianにROS2-Foxyをビルドしました🐢🍓#RaspberryPi #ROS2 pic.twitter.com/EJZUJdsATM
— Ar-Ray (@Ray255Ar) 2021年9月26日
基本はLinuxへのビルド手順と変わらないですが、一部変更する必要があります。
undefined reference to '__atomic_load_8'のエラーが出る箇所:-latomicをCMakeLists.txtのtarget_link_librariesに書き込みます。参考issueros2/rvizとqt_gui_cppとrqt_gui_cppのディレクトリを削除します。GUIツールはエラーで諦めました…
ビルドはcolcon build --symlink-installで行い、セットアップは、source ~/ros2_foxy/install/local_setup.bashでOKです。