もう2ヶ月前になってしまいますが、Apple製品を中古で2つ購入しちゃいました🍎📱

1つは Mac mini (M1 8GB RAM)、もう一つはiPhone 15 Proです。
iPhoneの方はスキャン試したいなーというノリでMacのついでに買いましたが、よく考えたらスマホの方が中古のMac3台分の価格するんですね🙃
初任給手取りが吹っ飛ぶレベルのスマホと聞いていたのですが、中古でもめっちゃ高かったです💸💸💸
この2台をクレカ一括で支払ってしまったので、明後日くらいにものすごい額が吹っ飛ぶ予定です。
もやし生活再開の機運…?
以前のPCでお小遣いを吹っ飛ばしたAr-Rayの記事↓
M1 Mac miniとは?
M1 Mac miniはAppleが販売するミニPCシリーズであるMac miniの2020年モデルです。
この時期に出たMacシリーズは全てARM64ベースのAppleカスタムのSoC(通称Appleシリコン)を搭載しており、従来とは比べ物にならない性能と省電力を兼ね備えています。
私は2年前くらいにおもちゃとしてM1 Macbook Airを購入したのですが、この性能の高さには驚きました。
今でこそ15万くらいするMacシリーズですが、当時は10万くらいで購入できたシリーズだったので、安定動作する環境さえそろえばAppleらしからぬ「価格破壊」PCです。
リリースからすでに3年経ち、かなり環境も整ってきている気がします。最近はメモリ帯域の太さを生かした生成AI・LLMのローカルランタイムとしての活躍もちらほら見られるようです。
個人的には最新のM3チップを搭載したMac miniとMac studioに期待しています。
性能や価格によってはこれを機にamd64環境を捨ててもいいかなーとすら思っていたり。
セットアップ。そして分解
最安値と思われるMac miniを現地調達してその日のうちにセットアップしました。

ユーザ名は「m1_mac_de_hajimeru_ros2」にしました。最近はM1 MacでROS 2を動かすことが流行しているようです。
リモートログイン設定などを行ったので、分解します。
分解しようとしたら、早速困難にぶつかりました。

ネジの形が全く合いませんでした。
教えてもらった工具キットをAmazonで調達して翌日分解しました。

たくさん種類がありましたが、Mac miniの分解には5種類くらいのネジ頭があるのでこれだけで十分でした。ただ、届かないところもいくつかあったので注意です。
次に電源です。
Mac miniは100VのAC入力ですが、ボードは12V入力なので、電源線を改造してバッテリー駆動させることにします。
YouTubeで動画を漁るとAC入力をDC入力に改造する動画が見つかったので、これをもとに改造しました。
色が全部同じなので、ややこしかったりします。あとはコンデンサに溜まっている電荷には注意です⚡️
電源ボタン(床に落ちていたバスの降車ボタン)を追加して、改造完了。

バッテリー駆動したらそれはもう実質MacBook🙃💻
軽いスペック詳細
CPU性能とかは他のサイトにいくらでも転がっていると思うので、個人的にSBCとして使えるのかどうか軽く調べました。
サイズ
ラズパイと並べて比べてみました。

Mac miniの筐体は結構大きめでしたが、本体自体はN100向けマザボやJetson Nanoボードとあまり変わらないくらいでした。
USB4やEthernetが使えるので便利です。
電力
グラフとかは用意できませんが、アイドル時(デスクトップ画面出すだけ)場合は、3.5Wを中心に揺らいでいました。
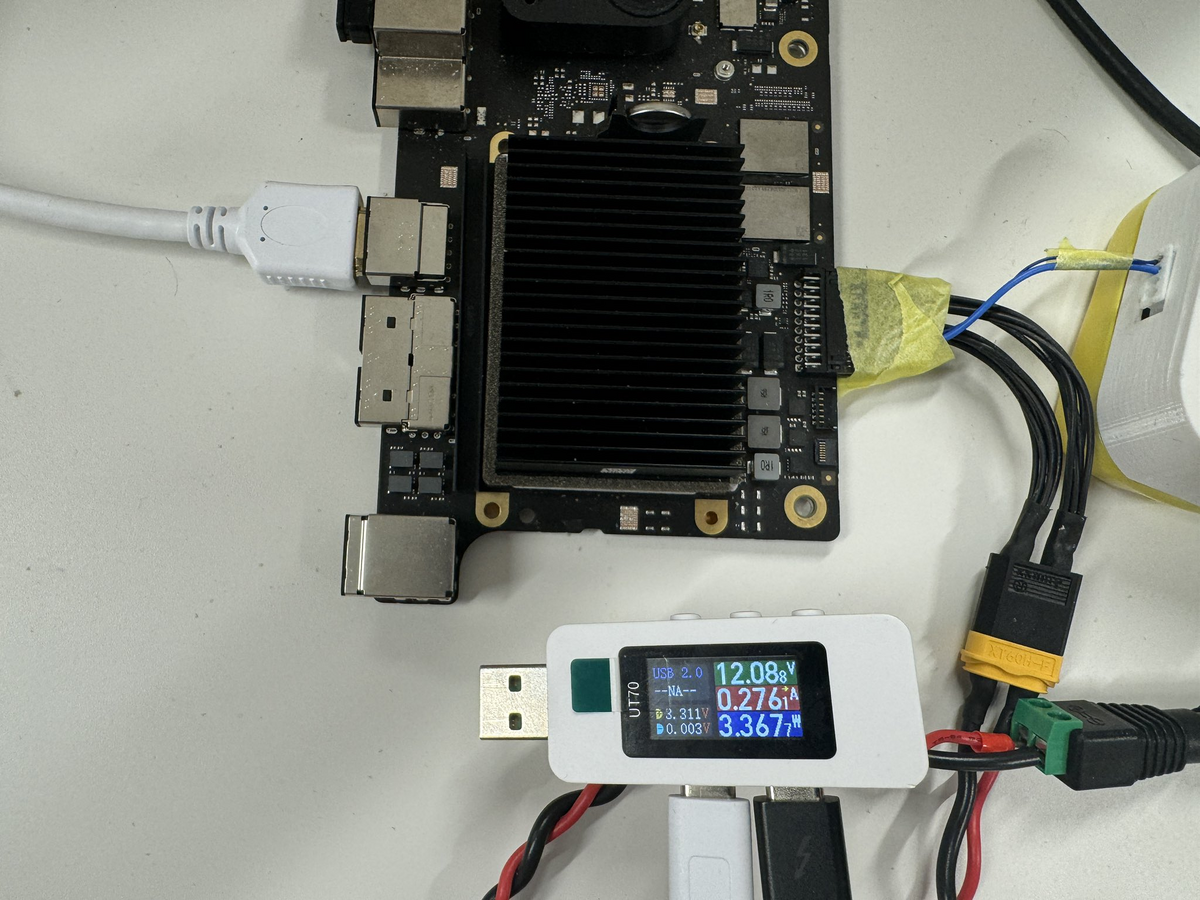
ラズパイ5が2.8W、N100が7.2WなのでARMらしい省電力ですね。
CPU 8コアをstressコマンドで負荷をかけた時は11.5Wくらい消費します。10Wちょっとで済むのはすごい。
普段使いやROS 2程度のコンパイルでも性能不足は感じなかったので、かなり驚きでした。
まとめ
性能・省電力・サイズ・コストともに合格ラインは大幅に超えてそうでした。
ロボット向けに使えるかどうかはこれから(ゆっくり)検証していこうと思います。